|
Haodong Zhang I am a PhD student at Zhejiang University, focusing on motion imitation learning, under the supervision of Professor Rong Xiong and Yue Wang. I received the B.S degree from the Department of Control Science and Engineering, Zhejiang University, Hangzhou, China, in 2020. |

|
ResearchMy latest research interests include embodied AI and imitation learning. |

|
Natural Humanoid Robot Locomotion with Generative Motion Prior
Haodong Zhang*, Liang Zhang*, Zhenghan Chen, Lu Chen, Yue Wang, Rong Xiong IEEE International Conference on Intelligent Robots and Systems (IROS), 2025 project page/ arXiv The generative motion prior (GMP) provides fine-grained motion-level supervision for the task of natural humanoid robot locomotion. |
|
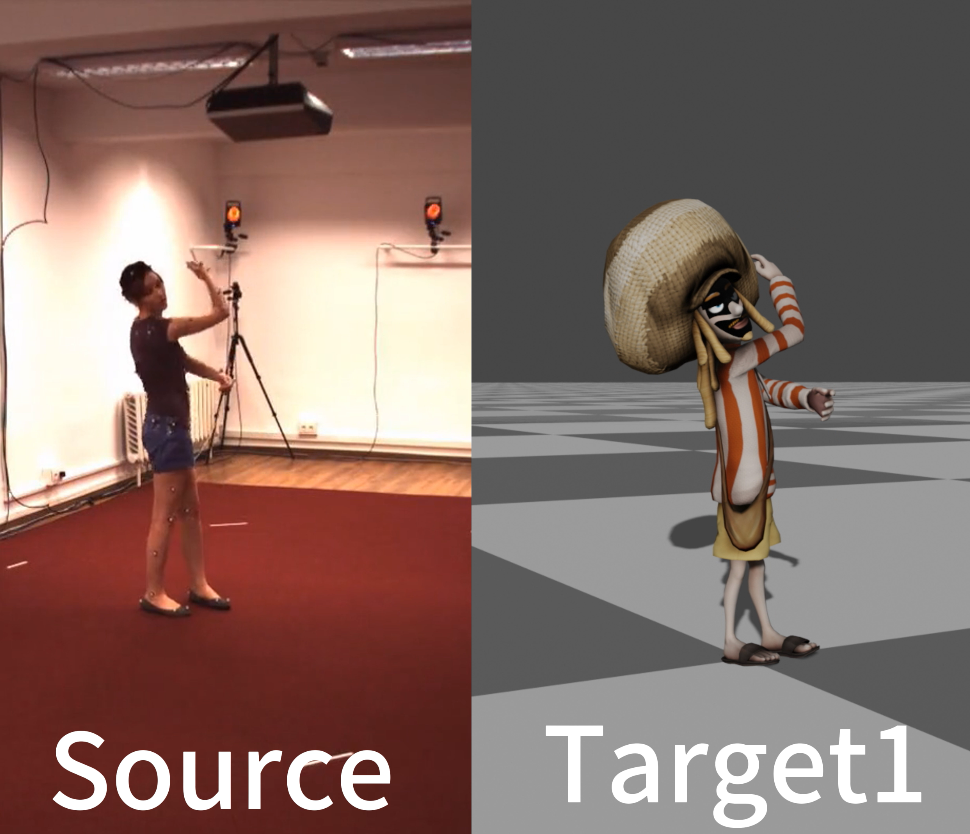
Semantics-aware motion retargeting with vision-language models
Haodong Zhang*, Zhike Chen*, Haocheng Xu, Lei Hao, Xiaofei Wu, Songcen Xu, Zhensong Zhang, Yue Wang, Rong Xiong Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024 project page/ arXiv/ code We introduce the incorporation of robust, state-of-the-art vision-language models to provide semantic guidance to the motion retargeting network. |
|
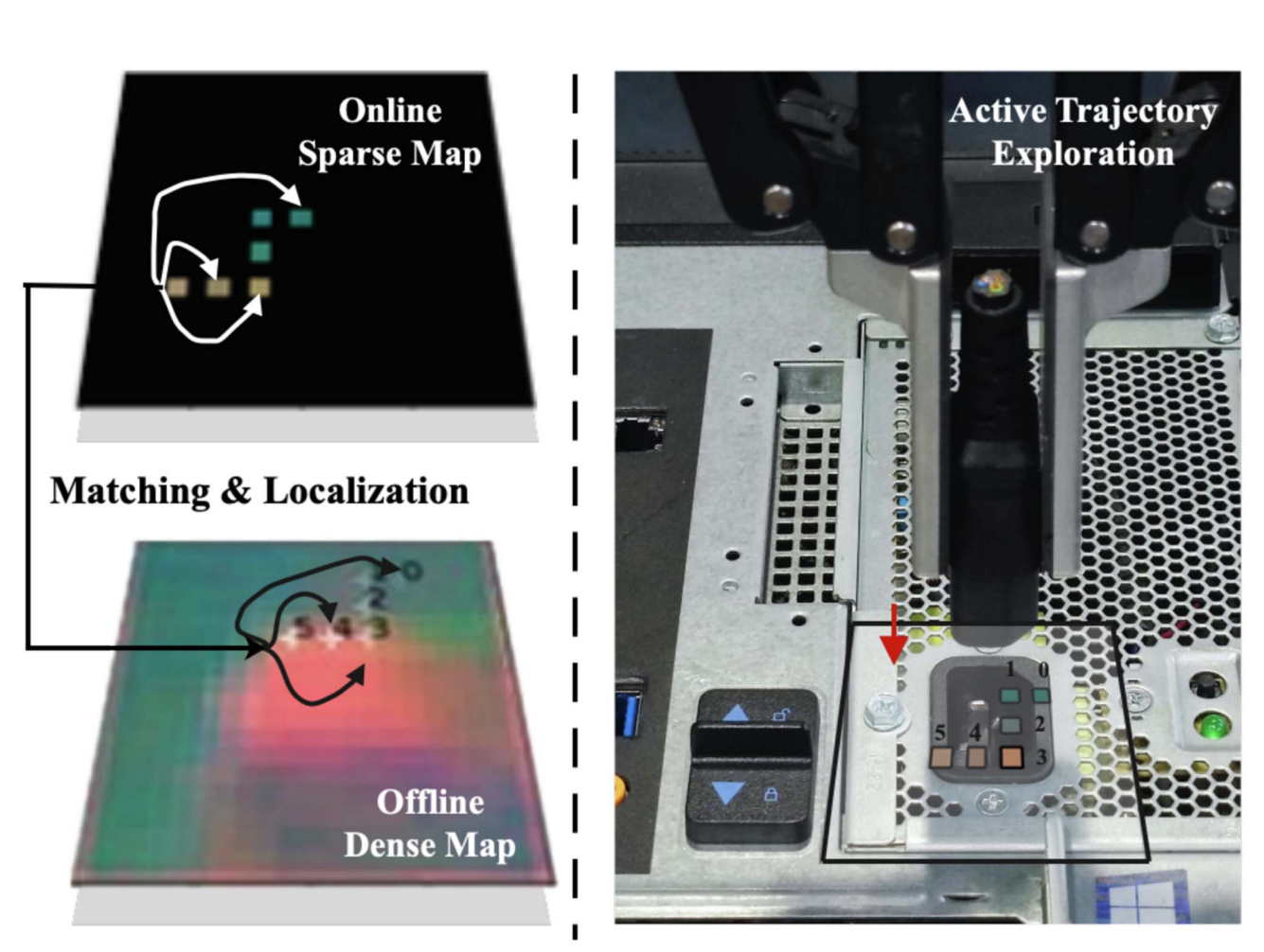
Learning active force–torque based policy for sub-mm localization of unseen holes
Liang Xie, Haodong Zhang, Yinghao Zhao, Yu Zhang, Rong Xiong, Yi Ren, Yue Wang IEEE Transactions on Industrial Informatics, 2024 paper/ code Our goal is to enable robots to operate effectively in contact-rich environments with tight tolerances, and adapt to new tasks involving unseen peg-hole pairs. |
|
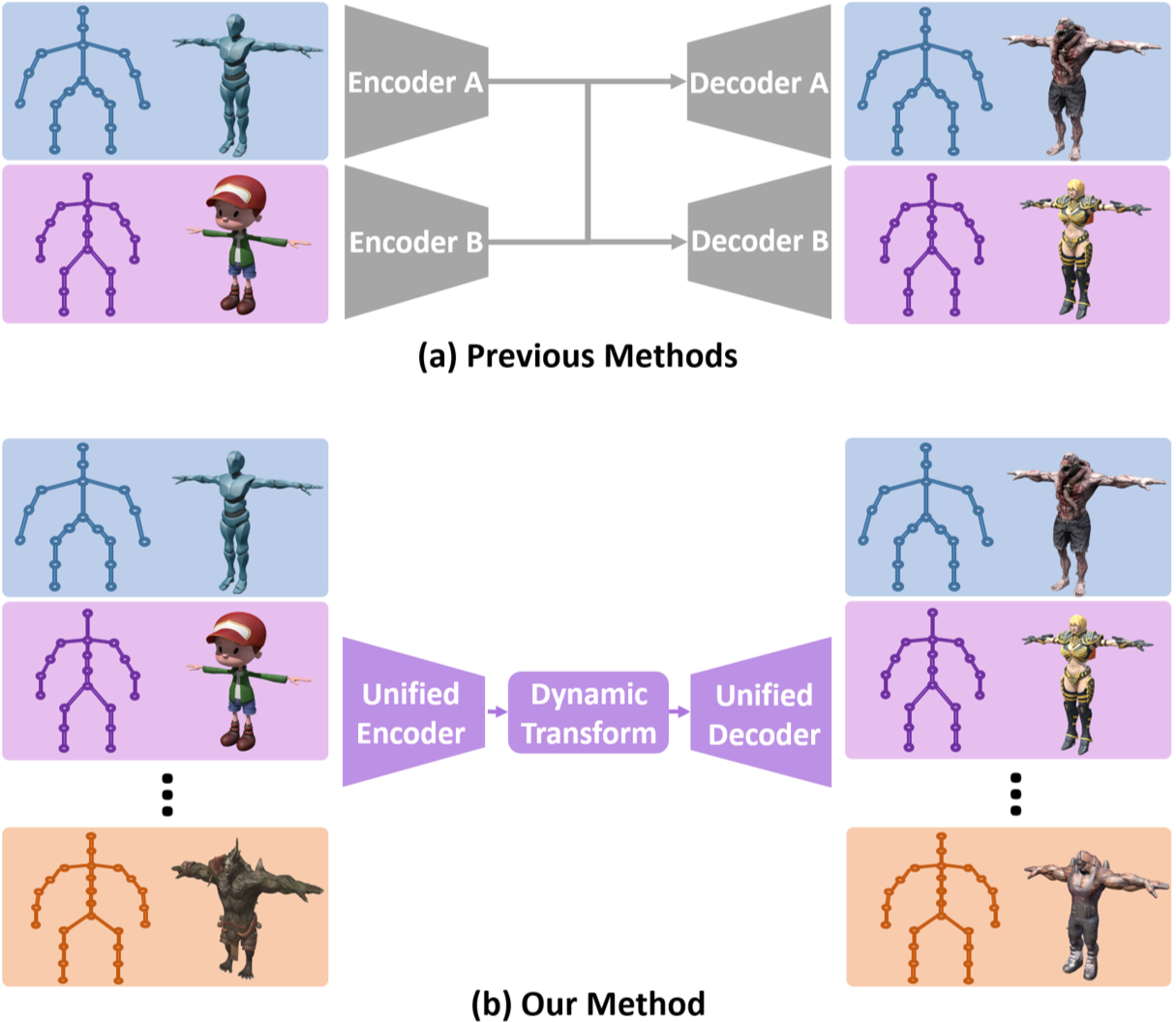
Unified Cross-Structural Motion Retargeting for Humanoid Characters
Haodong Zhang, Zhike Chen, Haocheng Xu, Lei Hao, Xiaofei Wu, Songcen Xu, Rong Xiong, Yue Wang IEEE Transactions on Visualization and Computer Graphics (TVCG), 2024 paper We address the challenge of motion retargeting across previously unseen skeletal structures with a unified dynamic graph network. |

|
Learning to Fill the Seam by Vision: Sub-millimeter Peg-in-hole on Unseen Shapes in Real World
Liang Xie, Hongxiang Yu, Yinghao Zhao, Haodong Zhang, Zhongxiang Zhou, Minhang Wang, Yue Wang, Rong Xiong IEEE International Conference on Robotics and Automation (ICRA), 2022 arXiv/ code By imitating the human's behavior, we design architectures with position and orientation estimators based on the seam representation for pose alignment, which proves to be general to the unseen peg geometries. |
|
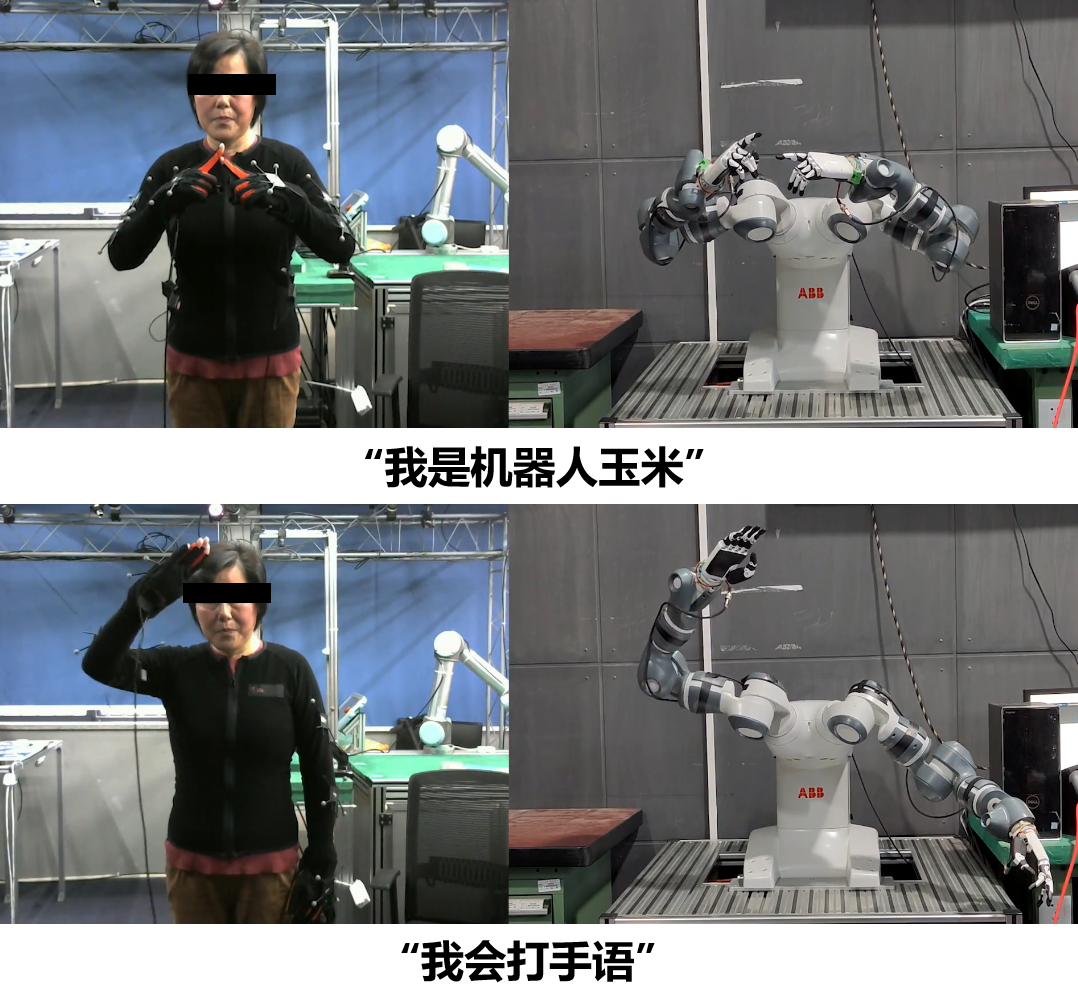
Kinematic motion retargeting via neural latent optimization for learning sign language
Haodong Zhang, Weijie Li, Jiangpin Liu, Zexi Chen, Yue Wang, Rong Xiong IEEE Robotics and Automation Letters (RAL), 2022 presented at IEEE International Conference on Robotics and Automation (ICRA), 2022 arXiv/ code Latent optimization utilizes a decoder to establish a mapping between the latent space and the robot motion space. Afterward, the retargeting results that satisfy robot constraints can be obtained by searching for the optimal latent vector. |
|
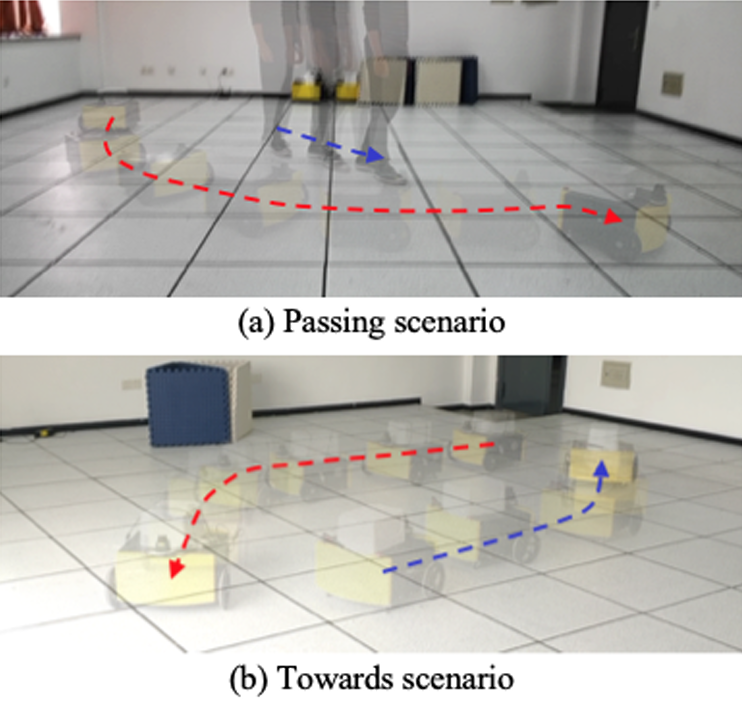
Learning world transition model for socially aware robot navigation
Yuxiang Cui, Haodong Zhang, Yue Wang, Rong Xiong IEEE International Conference on Robotics and Automation (ICRA), 2021 arXiv/ code A model-based reinforcement learning approach for robots to navigate through crowded environments. |